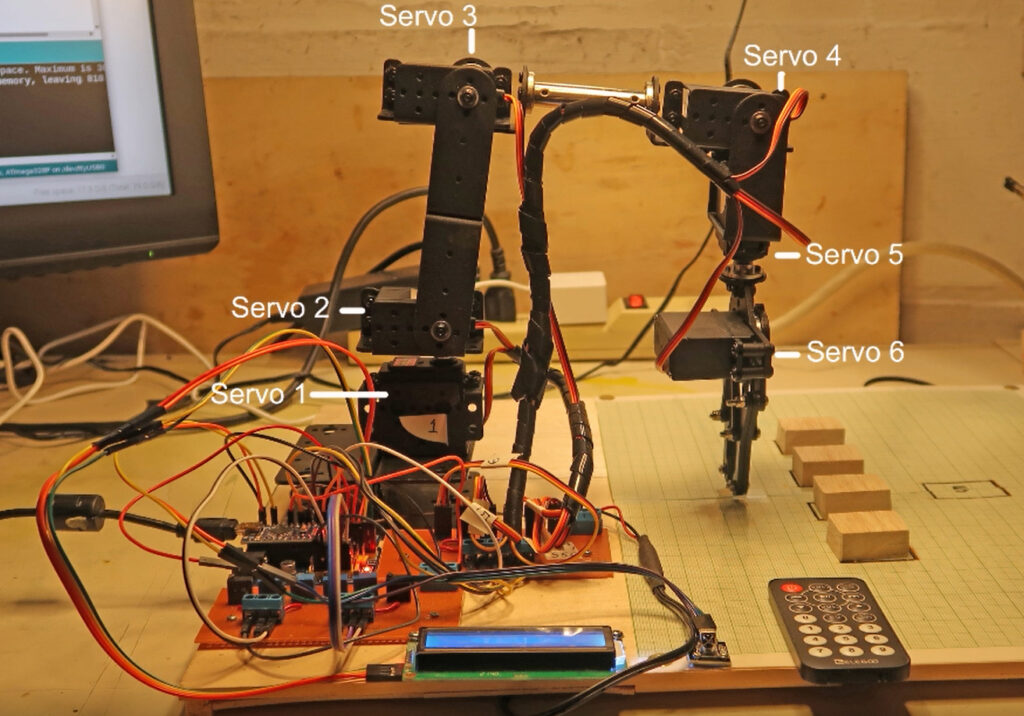
6 Degree of Freedom Robot
An Arduino Nano Controlled 6 DOF Robot with IR Remote Control and LCD Joint Angle Display. Modes of operation include Pick and Place, Lissajous like motion, Horizontal Sweep, Manual Potentiometer Joint Adjustment. All are selectable with IR Remote.
Project description
The project uses an IR Remote to select a number of arm operations. These include:
- Pick and Place – the arm is programmed to select and stack blocks from predefined positions.
- Demonstrate Lissajous like motion including circle, ellipse, slanted line, figure 8
- Horizontal sweep – arm sweeps left to right over a predefined arc and bottom to top in predefined increments
- Trim potentiometers to set Joint angles manually
An LCD displays the joint angle positions.
The program is written in C using the Arduino IDE.
An important feature of the code is a method to reduce the speed that the arm transitions from original destination to final destination. The method involves creating a function that moves the arm from the initial position to the final position in 1 degree increments or decrements. This eliminates the large inertia that would result in the arm moving between positions at maximum speed resulting in stress on the metal gears.
IR Remote Button Description
- Red Power Button – sets arm to Home position
- ST/RPT Resets all stop execute functions
- EQ Enables Lissajous like motion of robot arm
- Pause Button enables horizontal sweep of arm
- Func Stop enables adjustment of arm angles using trim potentiometers
- 0 starts a complete tower build sequence
- 1 starts a Home to Position 1 to Home sequence
- 2 starts a Home to Position 2 to Home sequence
- 3 starts a Home to Position 3 to Home sequence
- 4 starts a Home to Position 4 to Home sequence
- 5 starts a Home to Position 5 to Home sequence
- 6 starts a Home to Position 5 level 2 to Home sequence
- 7 starts a Home to Position 5 level 3 to Home sequence
- 8 starts a Home to Position 5 level 4 to Home sequence
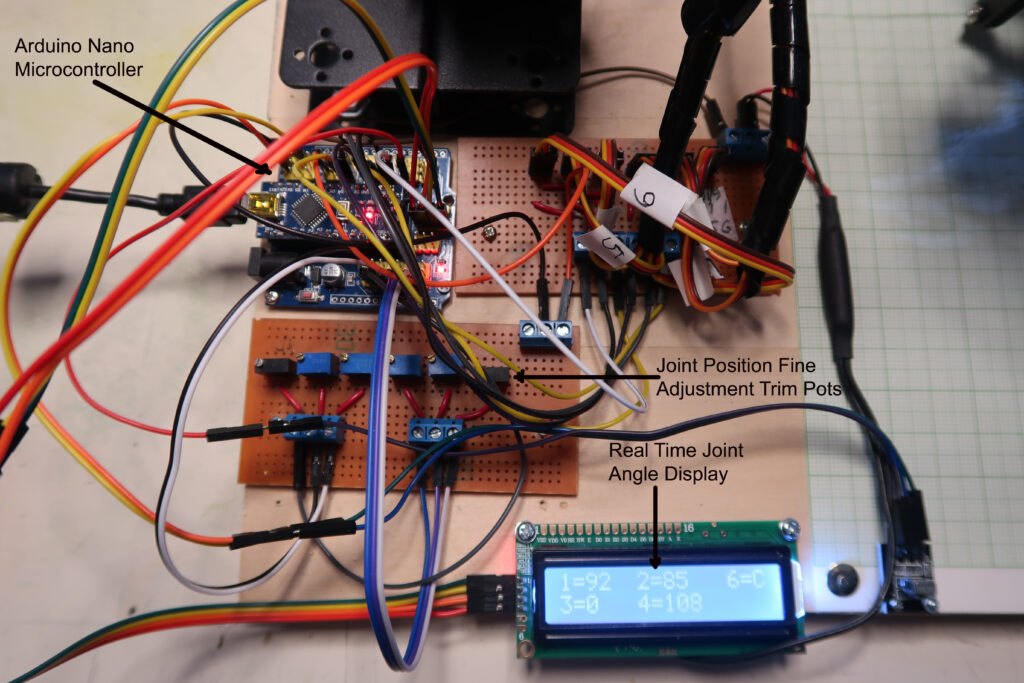
Robot Electronics and Microcontroller
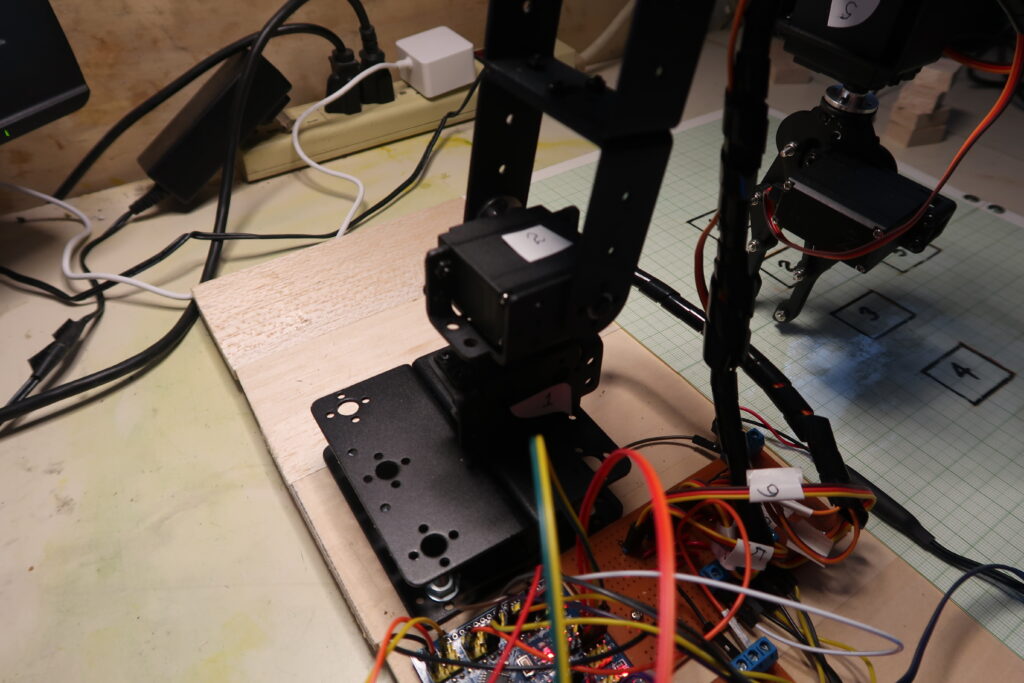
Joints 2 and 1
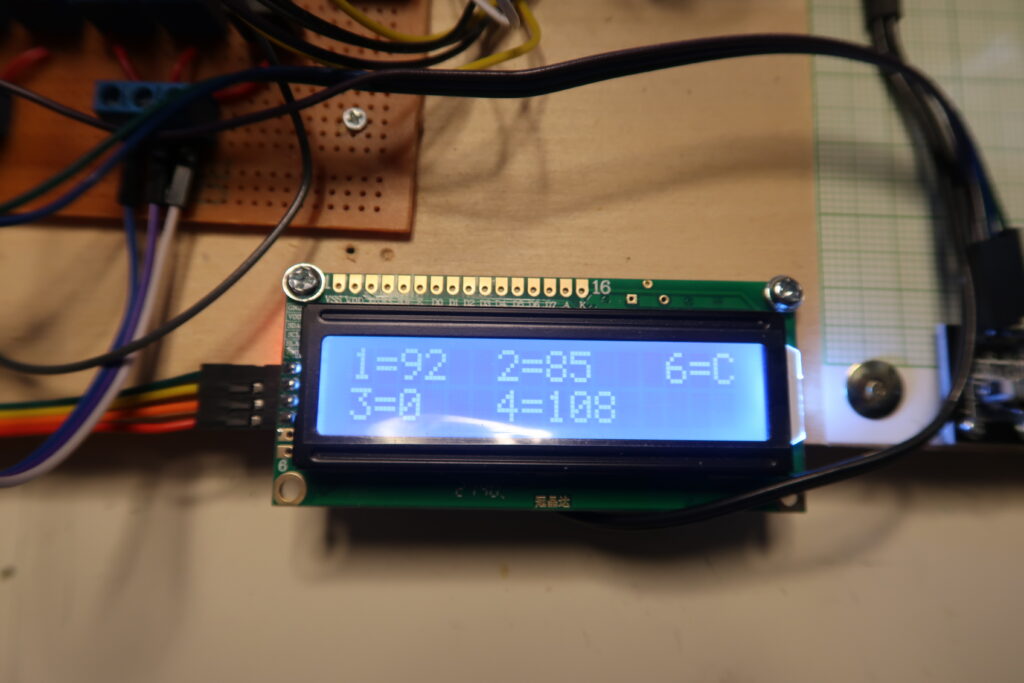
6 Joint positions in degrees – displayed in real time as robot performs tasks
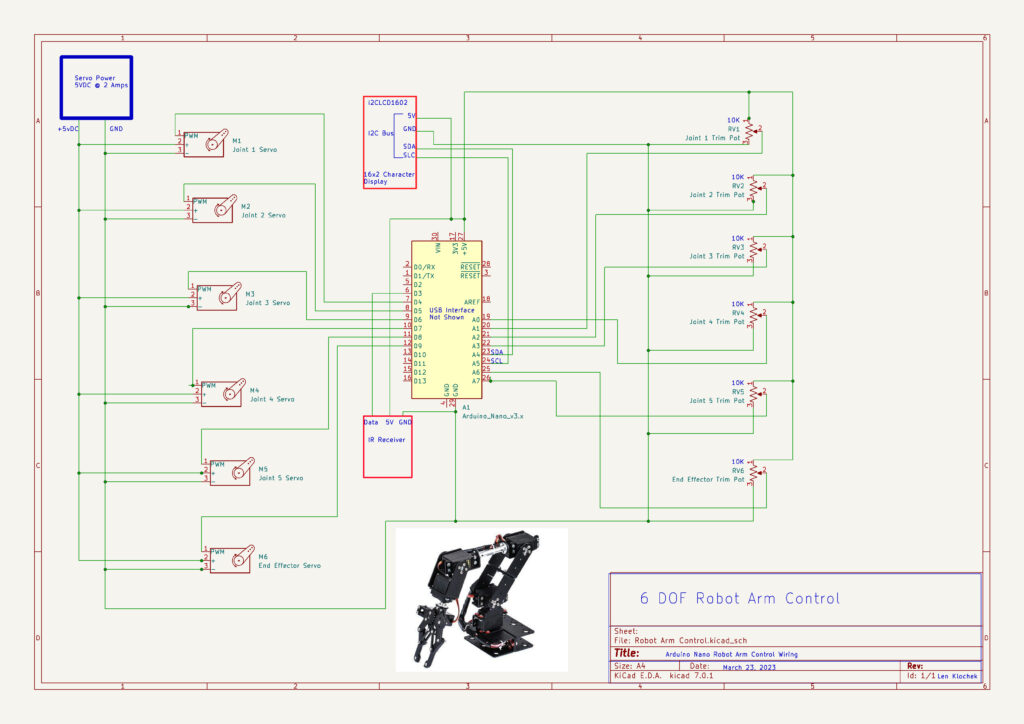
Robot Electronics – Schematic
Robot Code – Arduino IDE – C-C++
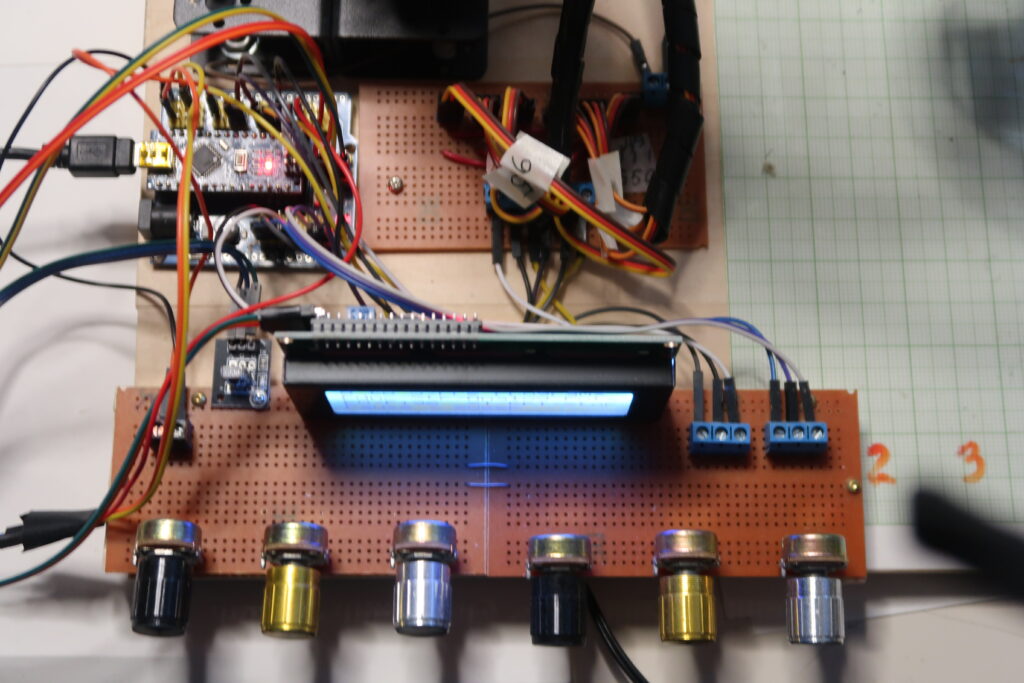
Recent Modification to Board Layout
Board layout was modified to accomodate larger potentiometers for easier manual robot joint manipulation. Electronic circuitry and C-C++ code remained the same. LCD display secured in a more readable vertical position.