This page will do the following:
- Explain the concept of Ziegler Nichols Open Loop (ZNOL) tuning concepts
- proportional, integral, and derivative
- Develop a graphical approach for generating the concepts
- Develop an approach for Automatically generating the Fast Autotune ZNOL contants
- Implement the approach on the Temperature Control System
- Describe the code and operation of the ZNOL Fast Autotuner
The graph below was captured from the Arduino Serial Plotter when running the program for the Temperature Control System. It was generated by creating a step change in the heater settings while the PID controller was in Manual mode. From a printout of the response, the appropriate geometry was applied manually. This included finding the inflection point and drawing a tanget whose intersection with the starting temperature yields the EffectivreDead Time. The 63.2% of the steady state value was found which enable finding the Time Constant . The Process gain was found by taking the ratio of the staedy state value of the Process Variable divided bt the change in heater setting. These three measurements were applied to the Ziegler Nichols formulas to yield the Proportional, Integral, and Derivative (PID) tuning constants.
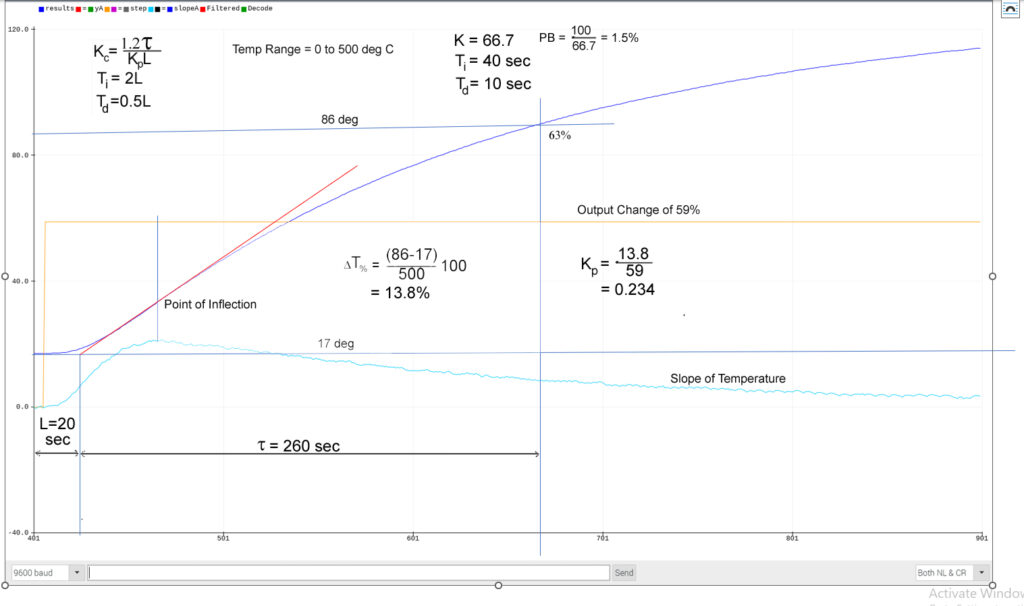
Autotuning will generate the proportional, integral, and derivative tuning constants and load them automatically into the PID controller. The approach is fast as the results are generated as soon as the point of inflection occurs, eliminating the need for the process to come to steady state.
The Autotune method for generating ZNOL tuning constants will be given in the link below:
Ziegler Nichols Open Loop Tuning Constants
The simplified code for generating the ZNOL Autotuning Constants is given in the link below: